« Overview

Long Term Infrastructure Perspective. Autonomous Driving.
Autonomous vehicles are playing an increasingly important role in our daily lives,
and we require more reliable,
more flexible vehicles that can carry out a variety of tasks in our complex transport infrastructure.
A major challenge in the development of such autonomous systems is managing unpredictable interaction with the environment,
which is ubiquitous in an urban context
where vehicles are exposed to changing traffic conditions, obstacles and hazards.
This case study is inspired by the DARPA Urban Challenge,
a competition for autonomous cars to navigate safely and effectively in an urban setting.
Safe and Sound. Formal Methods.
Reliability and safety are of particular importance
in the design of controllers for autonomous vehicles operating in situations where an accident could be fatal.
Leveraging the power of formal methods in developing the high-level control capabilities
allows for the provision of guaranteed performance to clients in hazardous traffic scenarios.
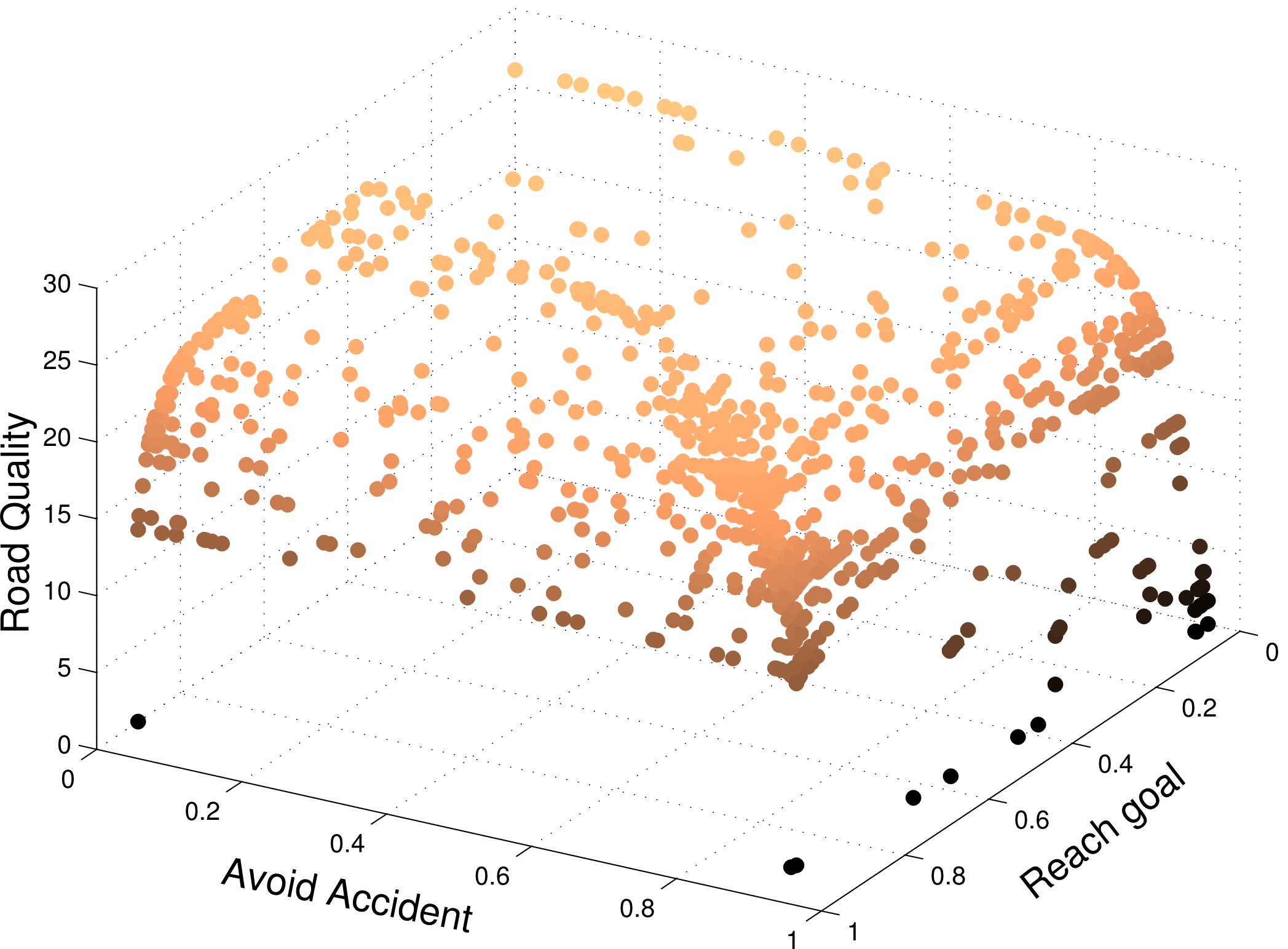
Moreover, trade-offs between several priorities,
such as minimising energy consumption, trip time, and probability of accidents can be accurately quantified.
The figure on the left shows Pareto points representing optimal trade-offs between such priorities.

Managing Uncertainty. Stochastic Games.
A vehicle in urban traffic only has control over its own actions,
and cannot influence other cars, pedestrians, traffic lights, or other potentially hazardous factors.
While sometimes the likelihood of certain events can be predicted,
a controller has to be able to appropriately handle all emergent situations.
It is acting as if playing a game it wants to win against the environment,
where the objective is to obtain an optimised trade-off between objectives –
for example, minimise the probability of hitting an obstacle and maximise road quality.
Stochastic games provide a means to model an autonomous vehicle in an adverse environment,
and solve the resulting game by providing strategies that attain the promised trade-offs.
A strategy is just a controller that can then be implemented in the autonomous vehicle to make the required steering decisions.
We have modelled the scenario of a car driving through various English villages
and show that the controllers obtained from a multi-objective extension of PRISM-games,
a tool developed for the analysis of competitive systems,
react correctly in the required traffic situations.
In an effort to cope with larger map sizes, we are developing methods to efficiently find safe controllers by putting together controllers for smaller, local, environments.
Sort by: date, type, title
11 publications:
-
[HK16]
X. Huang, M. Kwiatkowska.
Model Checking Probabilistic Knowledge: A PSPACE Case.
In Proc. AAAI Conference on Artificial Intelligence (AAAI'16), pages 2516-2522.
2016.
[pdf]
[bib]
-
[Kwi16]
M. Kwiatkowska.
Model Checking and Strategy Synthesis for Stochastic Games: From Theory to Practice.
In Proc. 43rd International Colloquium on Automata, Languages, and Programming (ICALP 2016), pages 4:1-4:18, Schloss Dagstuhl - Leibniz-Zentrum fuer Informatik.
2016.
[pdf]
[bib]
-
[SK16]
M. Svorenova and M. Kwiatkowska.
Quantitative Verification and Strategy Synthesis for Stochastic Games.
European Journal of Control, 30, pages 15-30, Elsevier.
July 2016.
[pdf]
[bib]
-
[FWH+16]
L. Feng, C. Wiltsche, L. Humphrey and U. Topcu.
Synthesis of Human-in-the-Loop Control Protocols for Autonomous Systems.
IEEE Transactions on Automation Science and Engineering, 13(2), pages 450-462, IEEE.
April 2016.
[bib]
-
[KPW16]
M. Kwiatkowska and D. Parker and C. Wiltsche.
PRISM-games 2.0: A Tool for Multi-Objective Strategy Synthesis for Stochastic Games.
In Proc. 22nd International Conference on Tools and Algorithms for the Construction and Analysis of Systems (TACAS'16), pages 560-566, Springer.
2016.
[pdf]
[bib]
-
[Wil15]
C. Wiltsche.
Assume-Guarantee Strategy Synthesis for Stochastic Games.
Ph.D. thesis, Department of Computer Science, University of Oxford.
2015.
[pdf]
[bib]
-
[BKTW15]
N. Basset, M. Kwiatkowska, U. Topcu, and C. Wiltsche.
Strategy Synthesis for Stochastic Games with Multiple Long-Run Objectives.
In C. Baier, and C. Tinelli (editors), Proc. 21st International Conference on Tools and Algorithms for the Construction and Analysis of Systems (TACAS), volume 9035 of LNCS, pages 256-271, Springer.
2015.
[pdf]
[bib]
-
[FWHT15]
L. Feng, C. Wiltsche, L. Humphrey, U. Topcu.
Controller Synthesis for Autonomous Systems Interacting with Human Operators.
In International Conference on Cyber-Physical Systems, pages 70-79, ACM.
2015.
[pdf]
[bib]
-
[CKSW13]
T. Chen, M. Kwiatkowska, A. Simaitis and C. Wiltsche.
Synthesis for Multi-Objective Stochastic Games: An Application to Autonomous Urban Driving.
In Proc. 10th International Conference on Quantitative Evaluation of SysTems (QEST 2013), pages 322-337, IEEE CS Press.
2013.
[pdf]
[bib]
-
[CFK+13c]
T. Chen, V. Forejt, M. Kwiatkowska, A. Simaitis and C. Wiltsche.
On Stochastic Games with Multiple Objectives.
In Krishnendu Chatterjee and Jiri Sgall (editors), Proc. 38th International Symposium on Mathematical Foundations of Computer Science (MFCS'13), volume 8087 of Lecture Notes in Computer Science, pages 266-277, Springer.
2013.
[pdf]
[bib]
Sort by: date, type, title
« Overview
